Large industrial assets and construction projects continuously evolve throughout their lifecycle. Modifications during construction, maintenance interventions, shutdown activities, retrofits, and operational adaptations gradually change the physical configuration of the facility over time. As these changes accumulate, the gap between the facility’s as-designed, as-built, and as-is conditions progressively increases, causing the digital representation of the asset to drift away from field reality.
This scenario creates a growing operational problem. 3D models are used as references for planning, maintenance, safety analyses, Management of Change (MOC), inspections, and construction execution. However, when the digital representation no longer reflects the actual as-is condition observed in the field, decisions begin to rely on assumptions rather than validated field conditions. In these contexts, detecting and reconciling field divergences (Scan vs. BIM) is essential for maintaining the reliability of the digital asset. But before understanding how Scan vs. BIM workflows operate, three fundamental concepts need to be clearly established: as-designed, as-built, and as-is.
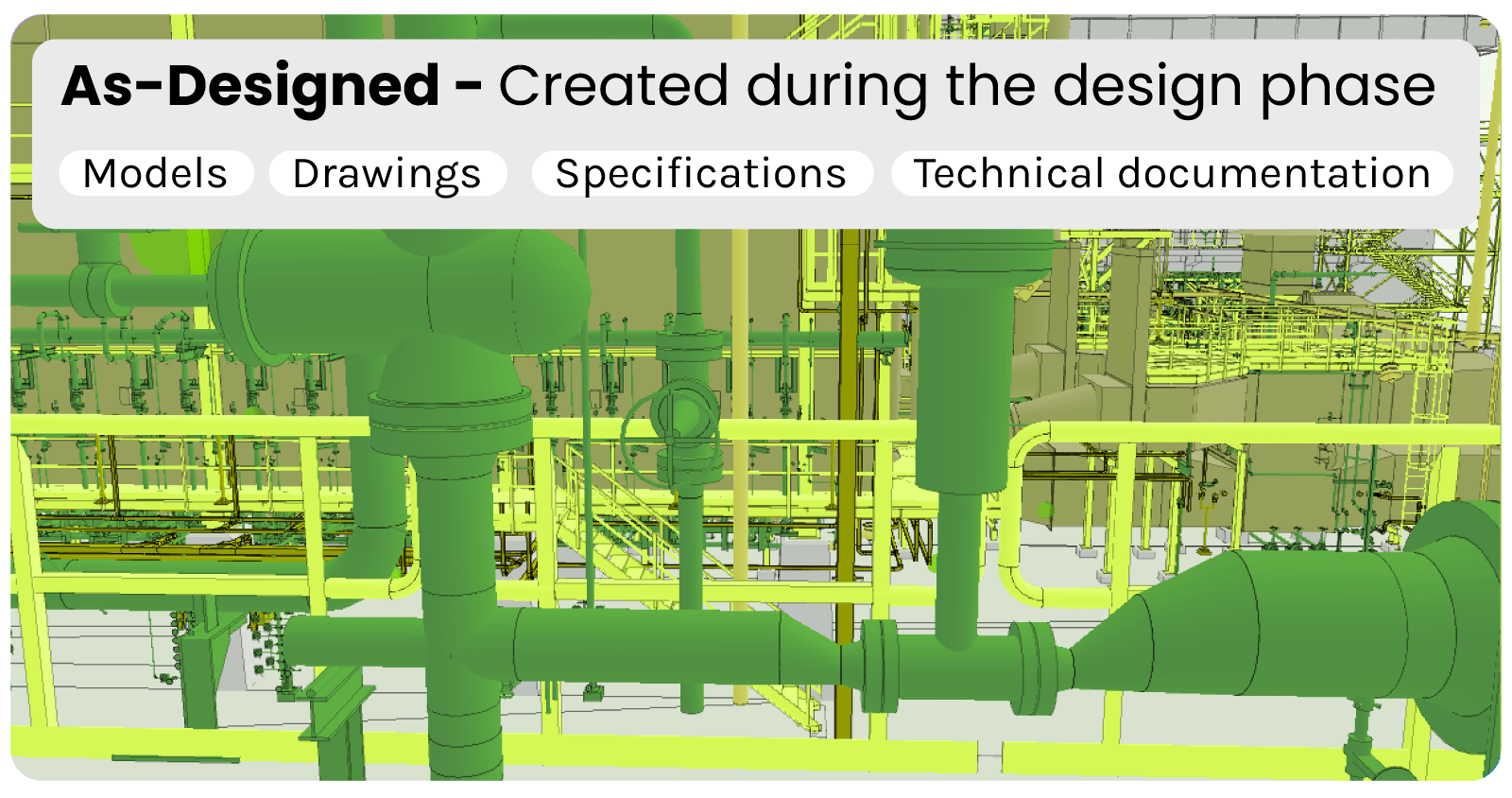
Understanding As-Designed, As-Built, and As-Is
The as-designed condition represents the original engineering intent of the asset. It corresponds to the models, drawings, specifications, and technical documentation created during the design phase, defining how the facility is expected to be constructed and operated.
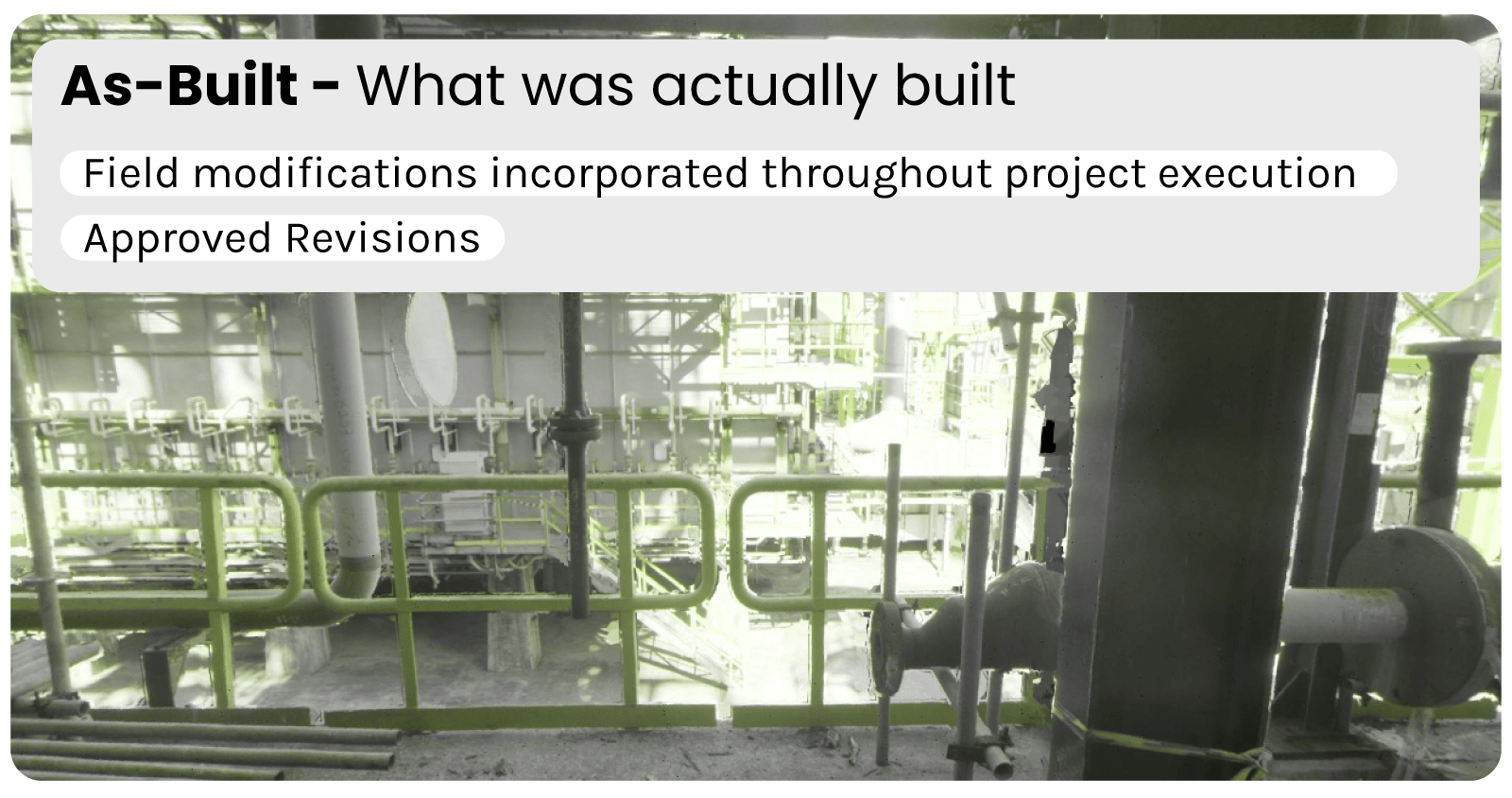
The as-built condition refers to the configuration that should represent what was actually executed during construction, including approved revisions and field modifications incorporated throughout project execution. Ideally, the as-built model becomes the validated digital representation of the completed asset.
The as-is condition, however, represents the current physical state of the facility observed directly in the field at a given moment in time. In operational environments, this condition changes continuously as maintenance activities, retrofits, temporary adaptations, shutdown interventions, and undocumented modifications occur throughout the asset lifecycle.
In theory, these three representations should remain aligned. In practice, they progressively diverge from one another over time. The engineering model gradually stops reflecting the real condition of the asset, creating inconsistencies between what was designed, what should exist, and what actually exists in the field. This is the problem addressed by Scan vs. BIM and field divergence detection workflows: continuously reconciling the digital representation of the asset with its physical reality.
Vulnerabilities of not detecting what is missing
Not detecting what is missing in the field may leave operations dependent on assumptions rather than validated reality, creating a systemic source of decision error across the asset lifecycle. In large industrial assets and construction environments, this disconnect introduces vulnerabilities that extend far beyond documentation inconsistencies. Planning activities may rely on configurations that no longer exist, and interventions may be designed around inaccessible or modified areas. Because these inconsistencies are often invisible until the moment of execution, the operational impact tends to emerge downstream, in the form of rework, delays, material waste, unsafe conditions, and fragmented decision-making processes.
Knowledge fragmentation
One of the primary consequences of failing to detect field divergences is the progressive fragmentation of knowledge across the organization. Large projects and industrial facilities involve multiple disciplines operating simultaneously, including engineering, construction, commissioning, maintenance, inspection, operations, and safety teams. Each of these groups generates information continuously, yet updates are rarely consolidated into a single validated representation of the asset.
As modifications accumulate over time, information becomes distributed across spreadsheets, markups, PDFs, isolated engineering revisions, work packages, and tacit field knowledge retained by individuals. What one team understands locally is not necessarily reflected globally within the engineering model. In practice, this creates an environment where different stakeholders operate under different assumptions regarding the actual state of the facility.
This problem is particularly critical in industrial assets with long operational lifecycles. In offshore platforms and refineries, for example, shutdown modifications may never be fully propagated into the digital model later used for maintenance planning or safety analysis. Similarly, in construction projects, undocumented field adjustments may generate incompatibilities between structural, piping, electrical, and HVAC systems that only become apparent during later project phases.
False assumptions in decision-making
Engineering and operational decisions are frequently made under the assumption that the digital model accurately represents field conditions. However, once discrepancies begin to accumulate, the model gradually transitions from a reliable representation into a partially outdated abstraction of the asset.
This creates a situation in which interventions are planned around conditions that no longer exist. Teams may assume the existence of components that were never installed, rely on clearances that have been obstructed by later modifications, or design interventions around configurations that changed years earlier. In industrial environments, these inconsistencies often manifest during maintenance execution, shutdown planning, or field interventions, where unanticipated conditions generate delays, rework, and operational inefficiencies.
In construction projects, the same phenomenon produces clashes between disciplines, incorrect quantity assumptions, and sequencing conflicts during execution. The central problem is therefore not simply that the model contains inaccuracies, but that organizational processes continue to depend on it as though it were correct. As the divergence between model and reality increases, so does the probability of operational surprise.
Compromised safety and compliance
The consequences of divergence extend beyond productivity and project execution. Engineering models are frequently used as the basis for safety studies, hazard analyses, isolation planning, work permits, evacuation assessments, and Management of Change (MOC) processes. When these models no longer represent reality accurately, the validity of those analyses becomes compromised.
In refineries, gas processing facilities, and offshore installations, relatively small undocumented modifications may significantly alter assumptions embedded within safety studies. Changes in piping configurations, equipment positioning, access routes, or temporary installations can create conditions not reflected in the analyses supporting operational decisions.
Challenges of Detecting Divergences
Knowing the possible outcomes of not detecting divergencies, it is fundamental to look at the challenges of the process itself. Detecting discrepancies between the as-built model and the physical asset is not a trivial task, but a problem constrained by trade-offs in data acquisition, representation, and computational processing. These challenges compound each other, limiting the reliability, scalability, and frequency at which divergence detection can be performed.
Data acquisition trade-off
The first major challenge associated with field divergence detection lies in reality capture itself. According to Perez & Tah (2023), high-precision methods such as laser scanning provide a highly accurate geometric representation of the environment, often capable of detecting millimetric deviations with substantial reliability. This level of precision, however, comes at considerable operational cost.
Laser scanning campaigns typically require specialized equipment, trained acquisition teams, extensive field planning, and large processing efforts. In industrial environments such as FPSOs, refineries, and gas processing facilities, acquisition campaigns may extend over several weeks and generate extremely large datasets. Consequently, although the resulting geometric fidelity is extremely valuable, the operational burden associated with acquisition limits how frequently these campaigns can realistically be performed.
Image-based approaches, on the other hand, offer a fundamentally different trade-off. Conventional cameras, drones, and 360-degree imagery significantly reduce acquisition complexity and cost while enabling broader area coverage and more frequent validation cycles. However, these approaches generally provide lower geometric precision than laser scanning.
This creates a structural dilemma within divergence detection workflows. Methods optimized for geometric precision tend to be operationally expensive and difficult to scale continuously, whereas methods optimized for scalability and operational feasibility typically sacrifice dimensional accuracy.
Computational Complexity
Traditional Scan vs. BIM and Scan-to-BIM workflows are also constrained by substantial computational complexity. High-density point clouds generated through laser scanning contain enormous quantities of geometric information requiring intensive processing.
Tasks such as registration, segmentation, object recognition, geometric comparison, and BIM reconstruction consume considerable computational resources and often demand specialized expertise, in accordance with Tang et al. (2010). In large industrial facilities, processing cycles may extend from hours to days before discrepancies can be analyzed effectively.
Traditional approaches for detecting field divergences
As the gap between engineering models and field reality became a growing operational challenge, different approaches emerged to validate whether physical assets still matched their digital representations. Across construction, industrial facilities, offshore platforms, and infrastructure projects, divergence detection workflows traditionally evolved around manual verification processes and, more recently, high-precision reality capture methods such as laser scanning.
Manual Verification Workflows
Before the adoption of large-scale reality capture technologies, divergence detection relied primarily on manual verification processes. Engineering teams physically inspected the asset, compared field conditions against drawings and models, documented inconsistencies, and manually propagated updates into engineering documentation.
Although still widely used in construction and industrial environments, this approach introduces significant operational limitations. Manual validation is labor-intensive, highly dependent on individual expertise, and difficult to scale across large or continuously evolving facilities. In complex assets such as refineries, offshore platforms, and gas processing units, the volume of components and the density of the environment make exhaustive verification impractical.

Laser Scanning and Point Cloud-Based Approaches
The introduction of laser scanning significantly transformed Scan vs. BIM workflows by enabling high-fidelity digital reconstruction of physical environments. Through LiDAR and related scanning technologies, facilities can be captured as dense point clouds containing detailed geometric information about the asset.
This approach became the dominant paradigm for reality capture in industrial facilities, infrastructure projects, and complex construction environments because it enables highly accurate geometric comparison between field conditions and BIM models. Millimetric deviations, positioning errors, and dimensional inconsistencies can be identified with substantial reliability (Rashdi et al., 2022).
As previously mentioned, scanning methods pose structural limitations regarding image acquisition campaigns and heavy computational requirements. As a result, although laser scanning solves the problem of geometric precision, it does not fully solve the broader operational challenge of continuously maintaining alignment between the engineering model and the evolving physical asset in complex facilities.
How Vidya detects field divergences using only images
Vidya approaches field divergence detection from a different operational perspective: one focused on scalability, operational feasibility, and continuous validation of the asset over time. Instead of prioritizing dense geometric reconstruction and millimetric precision at every stage, the objective of the Digital Reality Match application is to maintain the digital representation of the facility consistently reconciled with field reality in a way that is practical to execute across large and continuously evolving environments.
The approach is built around an image-based Scan vs. BIM workflow, where reality capture can be performed using conventional visual acquisition methods such as 360-degree imagery, drone captures, mobile devices, or other lightweight data acquisition technologies. Unlike traditional scan-based approaches that depend heavily on specialized hardware and dense point cloud generation, the process focuses on creating a spatially contextualized representation of the asset capable of supporting operational validation workflows at scale.
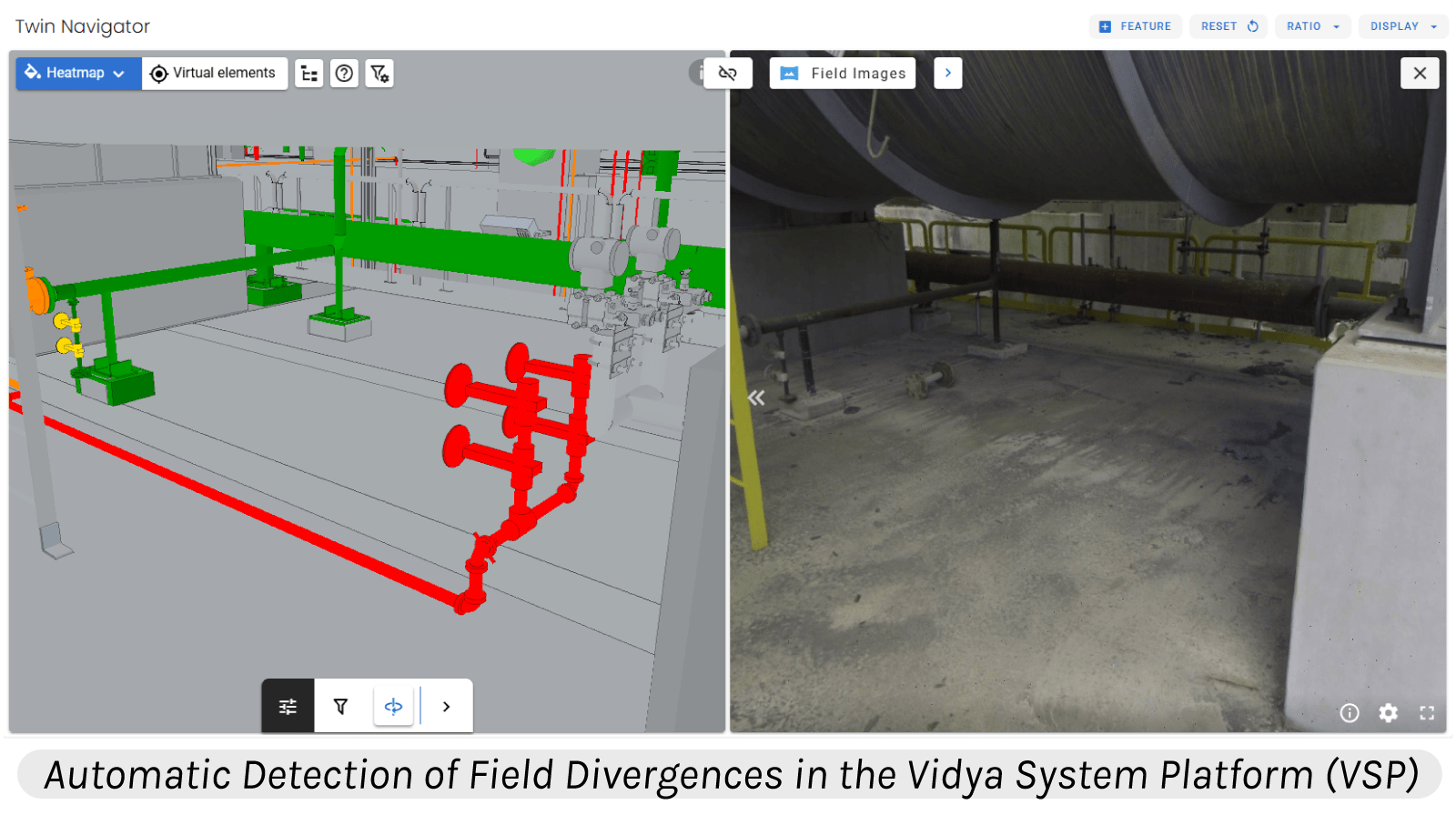
Once captured, field data is spatially correlated with structured engineering information such as BIM models, TAGs, asset hierarchies, and technical documentation. This synchronization allows the system to automatically compare the expected digital condition of the asset against the observed field condition, identifying whether that component exists in the field or not.
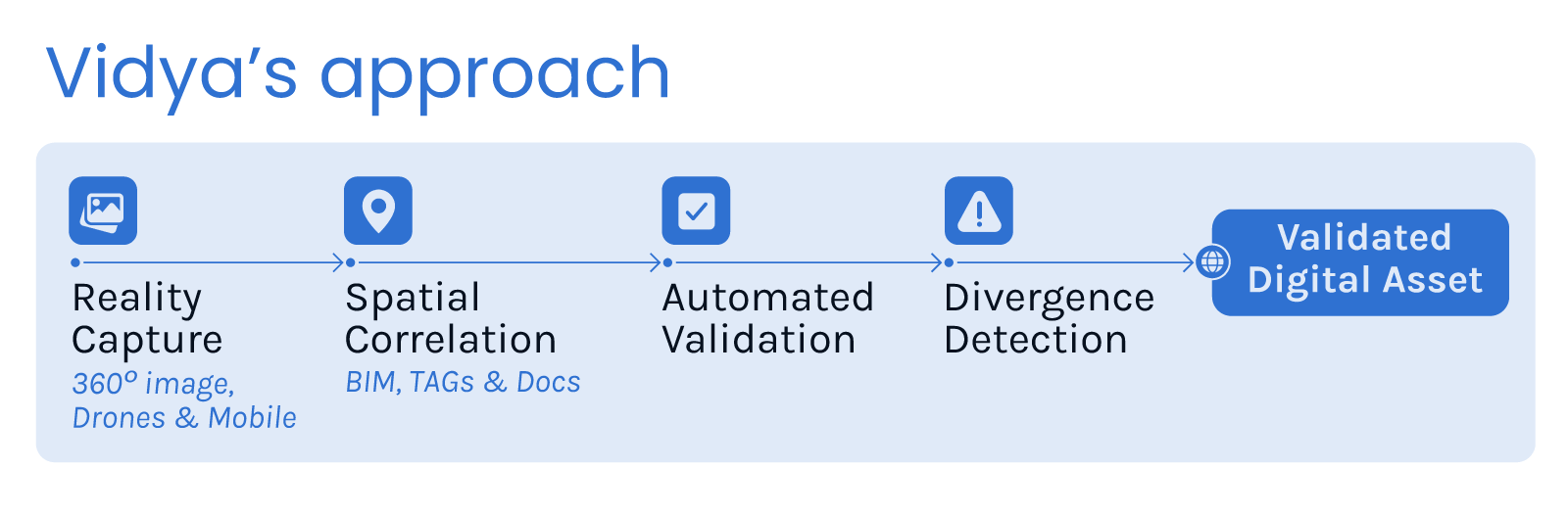
Rather than emphasizing millimetric geometric deviation analysis, the approach prioritizes the detection of operationally meaningful discrepancies that directly impact planning, execution, maintenance, and asset reliability. In practice, the objective is not simply to measure geometry with maximum precision, but to continuously validate whether the physical asset remains coherent with the 3D model, while reserving high-precision laser scanning efforts for situations where detailed geometric verification is actually required.
A central aspect of the workflow is the automation of the comparison process itself. By structuring divergence detection around automated correlation between captured reality and engineering context, the platform reduces dependency on manual interpretation, isolated validation efforts, and reconstruction-heavy Scan-to-BIM processes. This enables broader asset coverage and significantly increases the feasibility of performing recurring validation campaigns across complex facilities.
From a computational perspective, the workflow is also considerably lighter than traditional point cloud-based pipelines. Because the process does not rely exclusively on high-density geometric reconstruction, requirements associated with data storage, registration, processing infrastructure, and downstream analysis are substantially reduced.
Conclusion
As industrial facilities and construction projects evolve, maintaining alignment between the digital model and field reality becomes increasingly difficult, yet operationally essential. Traditional Scan vs. BIM approaches brought important advances in geometric validation, but their dependence on heavy acquisition and processing workflows limits their scalability and frequency of use. By enabling lighter, more frequent, and operationally scalable validation workflows, approaches such as Vidya’s expand the possibility of maintaining digital assets consistently connected to field reality throughout their lifecycle.